Computer Vision in ROS
Video encoding and decoding
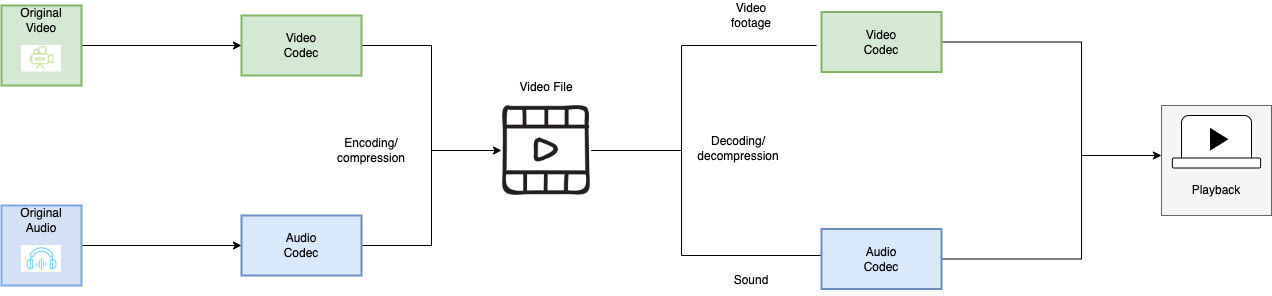
Video encoding is the process of compressing and potentially changing the format of video content, sometimes even changing an analog source to a digital one. In regards to compression, the goal is so that it consumes less space. This is because it’s a lossy process that throws away information related to the video
Decoding is essentially the reverse of encoding. A decoder takes an encoded, compressed stream/file and decompresses it back into its raw form. Raw video data is required for editing processes and for viewing of the raw video.
ROS 2 image transport for FFmpeg encoding
This ROS 2 image transport supports encoding/decoding with the FFMpeg library. With this transport you can encode h264 and h265, using Nvidia hardware acceleration when available.
image_common (contains image_transport)
cv_bridge
cv_bridge is a ROS package that provides an interface between ROS and OpenCV. It is used to convert between ROS images and OpenCV images.
OpenCV
OpenCV (Open Source Computer Vision Library) is an open source computer vision and machine learning software library. It is used as a library for real-time computer vision. It is written in C++ and its primary interface is in C++, but it still has a full C API. There are bindings in Python, Java and MATLAB/Octave.
OpenCV is used for a wide range of applications, including medical image analysis, stitching street view images, surveillance video, detecting and recognizing faces, tracking moving objects, extracting 3D models, and much more.