Robot Web Tools
Robot Web Tools is a set of tools for working with ROS in a web browser. It provides a set of tools for working with ROS from a web browser. It includes a JavaScript library for creating web-based user interfaces, a WebSocket interface to ROS, and a suite of web-based tools for working with ROS.
Rosbridge
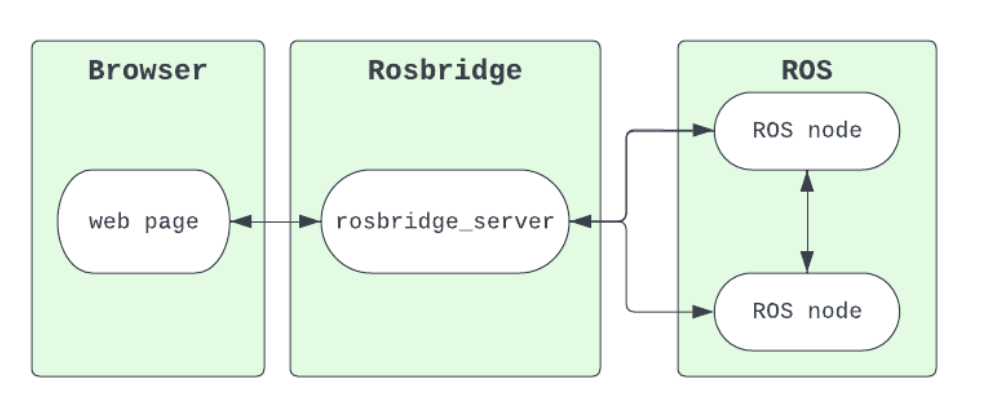
Rosbridge is a WebSocket interface to ROS functionality for non-ROS programs.
The message transport of rosbridge is JSON objects.
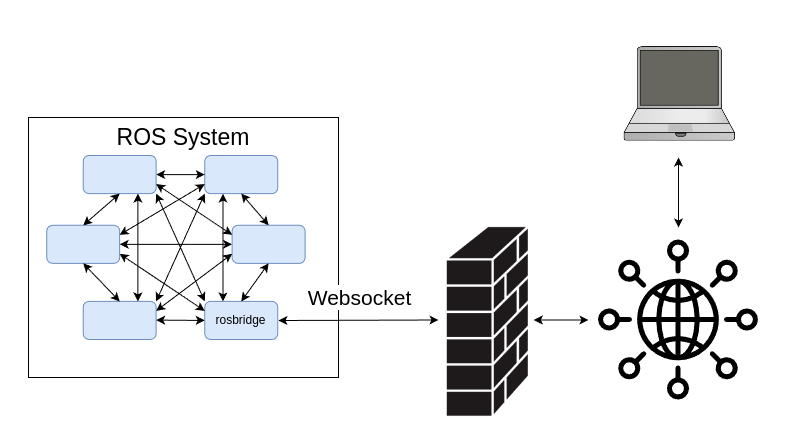
Rosbridge. Source.
rosbridge_server is a server which accepts websockets connections and implements the rosbridge protocol.
Installation and Usage
sudo apt-get install ros-<distro>-rosbridge-server(packages installed: rosbridge_server, rosbridge_library, rosbridge_msgs, rosapi)ros2 launch rosbridge_server rosbridge_websocket_launch.xml- launch the Rosbridge WebSocket server (default port: 9090)
Tutorial: Using rosbridge with ROS2
Foxglove
Foxglove Studio is an open source visualization and debugging tool for your robotics data.
It can be run as a standalone desktop app, accessed via your browser, or even self-hosted on your own domain.
ROS Foxglove bridge
The foxglove_bridge uses the Foxglove WebSocket protocol, a similar protocol to rosbridge, but with the ability to support additional
schema formats such as ROS 2 .msg and ROS 2 .idl, parameters, graph introspection, and non-ROS systems. The bridge is written in C++ and
designed for high performance with low overhead to minimize the impact to your robot stack
roslibjs (ROS JavaScript Library)
roslibjs is a JavaScript library for interacting with ROS from the browser. It uses WebSockets to connect with rosbridge and provides publishing, subscribing, service calls, actionlib, TF, URDF parsing, and other essential ROS functionality. It communicates with rosbridge using JSON messages. roslibjs is developed as part of the Robot Web Tools effort.