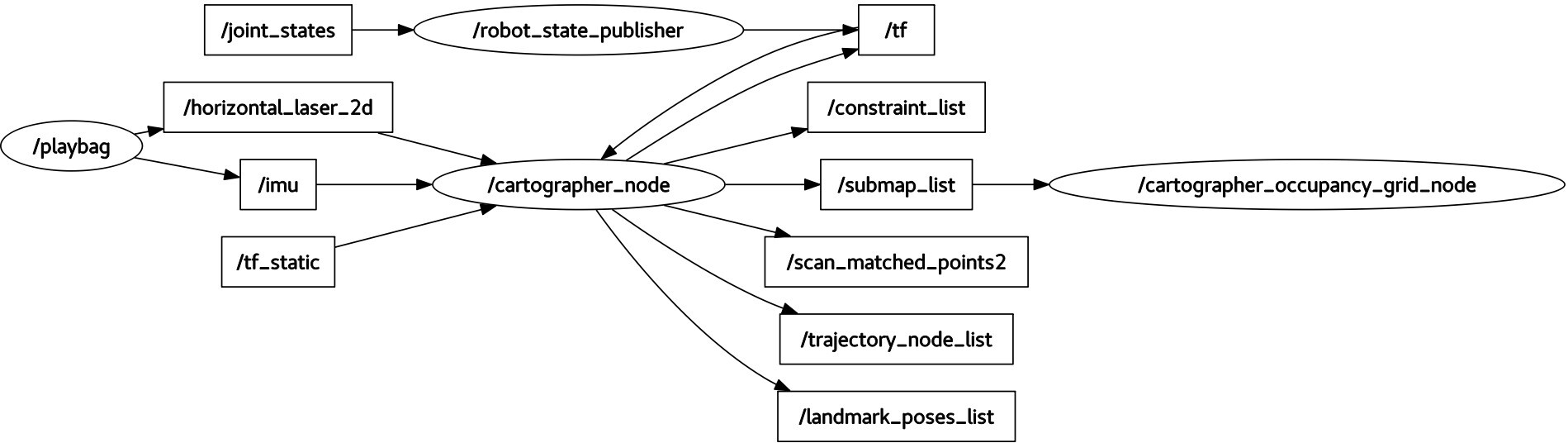
ROS graph
The ROS graph is a network of ROS 2 elements processing data together at the same time. It encompasses all executables and the connections between them if you were to map them all out and visualize them.
The edges of the ROS graph represent the publish and subscribe actions.