Parameters
Parameters in ROS 2 are associated with individual nodes. Parameters are used to configure nodes at startup (and during runtime), without changing the code. The lifetime of a parameter is tied to the lifetime of the node (though the node could implement some sort of persistence to reload values after restart).
How to Use ROS 2 Parameters
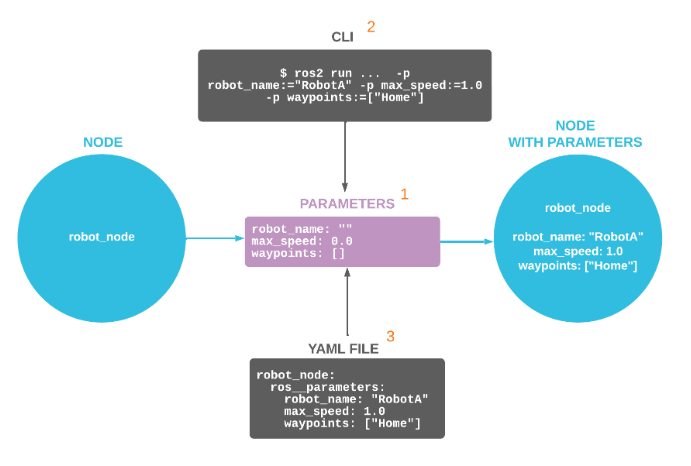
ROS 2 nodes first declare the parameters they can accept (1), then read the parameter values passed to them during startup – via the command line interface (2) or a YAML configuration file (3) – to determine their behavior. Parameters can be integers, floating point numbers, booleans, string, or arrays of the previous types