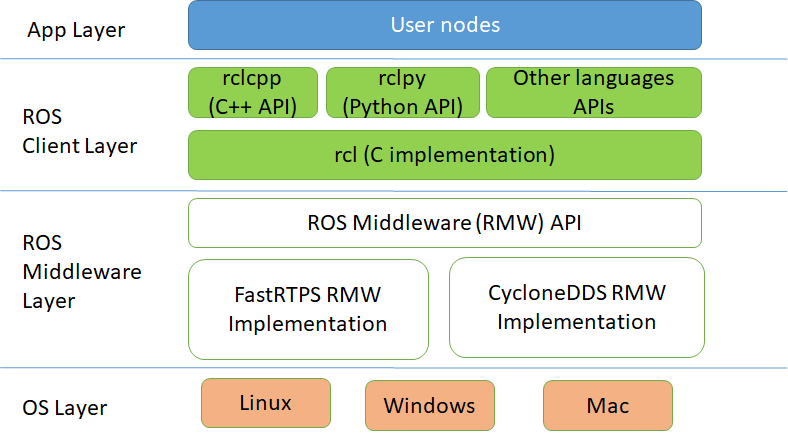
ROS2
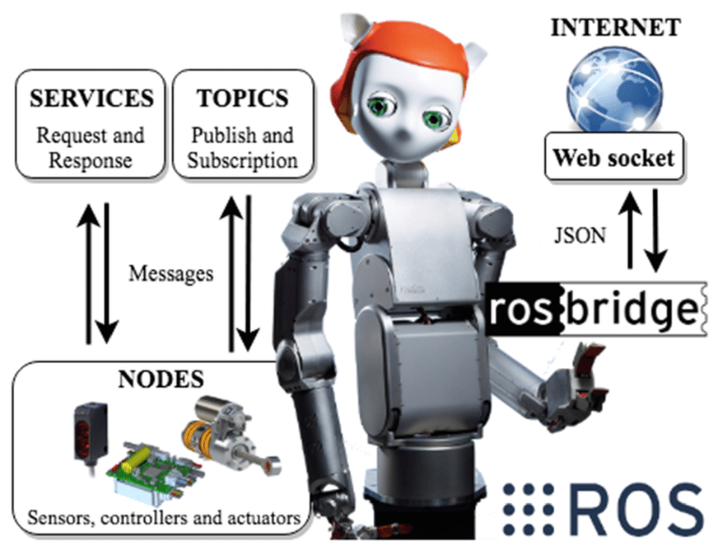
The Robot Operating System (ROS) is an open-source framework that helps researchers and developers build and reuse code between robotics applications.
The ROS goal is to provide a standard for robotics software development, that you can use on any robot.