Nav2 architecture
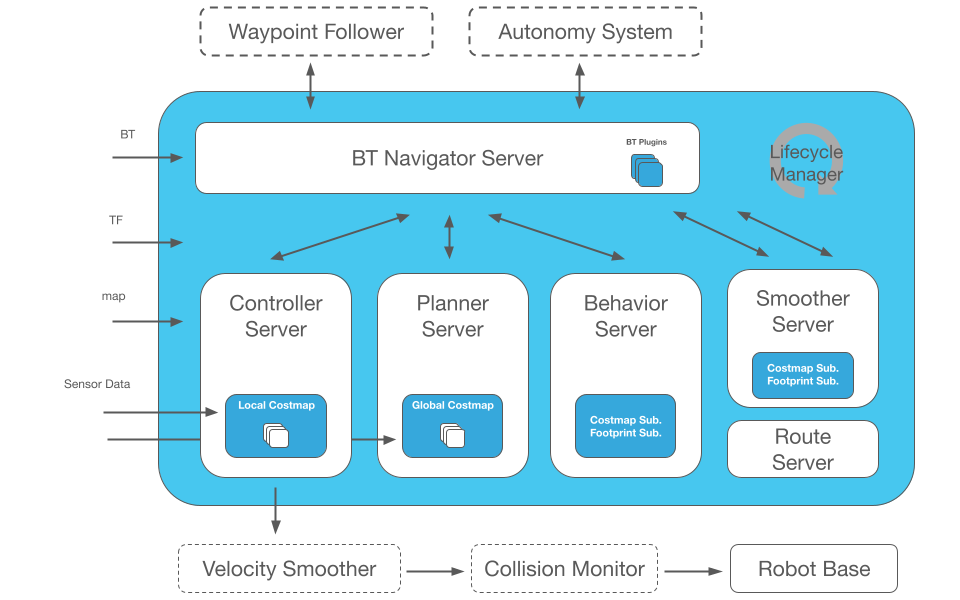
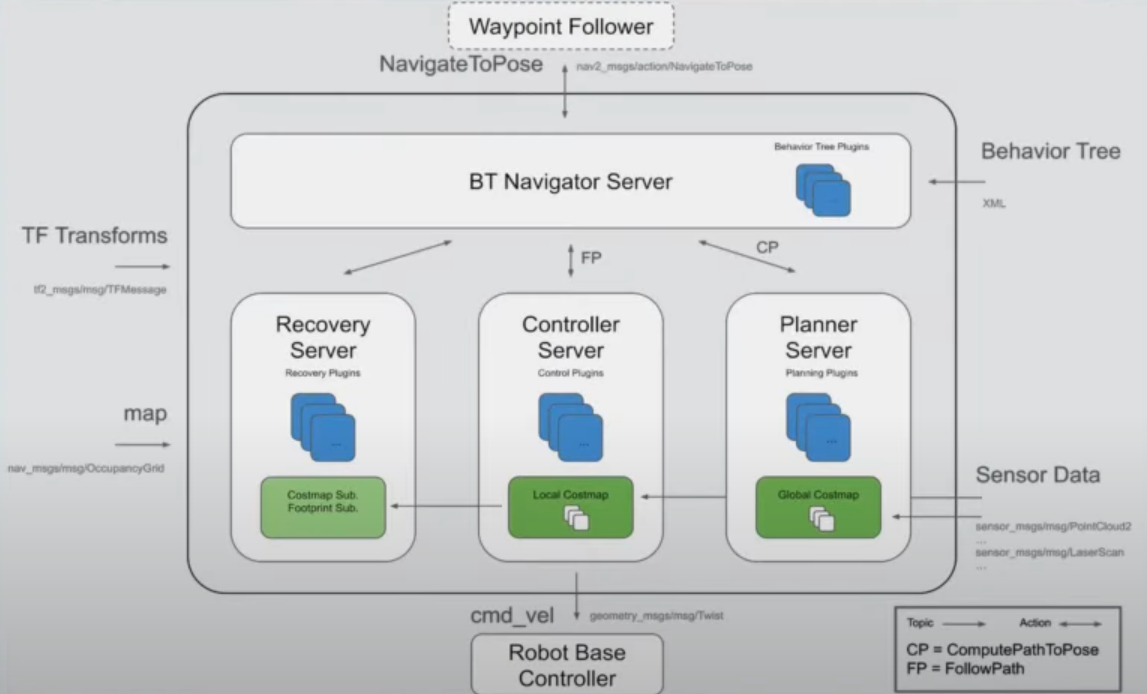
BT Navigator Server - behavioral tree determining the execution of the appropriate step of the algorithm (e.g. first determine the optimal path and then run the controller).
Controller Server - creates a local costmap and implements the server for handling the controller requests.
Planner Server - creates a global costmap and determines the optimal trajectories based on the global costmap.
Behavior Server - determines the actions that should be performed when the robot gets stuck.
Smoother Server - creates smoother path plans to be more continuous and feasible.